

 QQ
QQ

一、ABB机器人硬件(无附加轴)
硬件组成

二、机器人本体
本体作用
主体即机座和执行机构,包括臂部、腕部和手部,有的机器人还有外部轴行走机构。大多数工业机器人有3~6个运动自由度(关节轴),每个关节轴由伺服电机、编码器、抱闸装置组成。机器人有负载能力大小、工作半径范围、安装防护等级参数等,每种机器人本体根据不同工业需求而设计,例如搬运机器人、喷涂机器人。机器人本体分有机器人上臂、下臂和平衡装置,1-3轴下臂,4-6上臂。
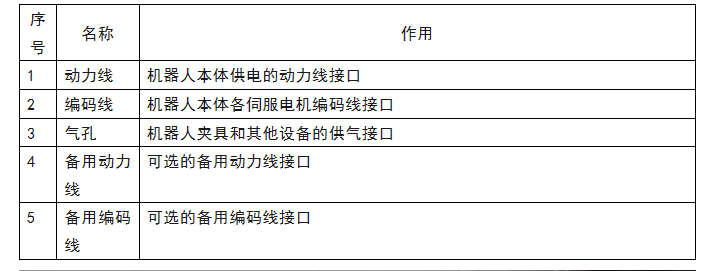
本体接口
本体安装
机器人本体是执行机构,根据实际需求工位位置进行安装,安装方式有正常的安装在地面上,垂直安装于墙面,或倒挂安装在天花板等安装方式。
三、机器人控制柜
控制柜分类
ABB机器人控制柜分为大型控制柜、中型控制柜、小型控制柜(紧凑型控制柜),根据实际机器人本体功率大小而配对不同,供电电源有交流220AC(200-230V)和交流380AC(400-600V)
控制柜内部组成
控制器系统主要由主计算机板、机器人计算机板、快速硬盘、网络通信计算机、示教器、驱动单元、通信单元和电力版组成。变压器、主计算机、轴计算机、驱动板、串口测量和编码器组成伺服驱动系统,对位置、速度和电机电流进行数字化调整,对电机进行控制进行同步。机器人系统从串行测量板连续的接收机器人新的数据位置,输入位置调整器中,与位置数据进行比较和放大,输出新的位置和速度控制。
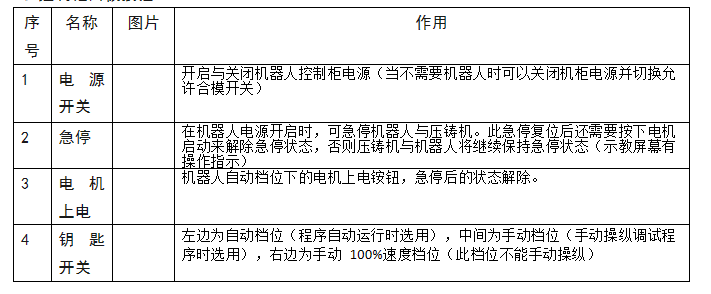
控制柜面板按钮
控制柜和机器人本体接线
四、ABB机器人示教器
示教器作用
示教器是进行机器人的手动操纵、程序编写、参数配置、程序调试运行以及监控用的手持装置,也是***常打交道的机器人控制装置。
说明:这里仅仅对大致ABB机器人硬件组成了解,一些基本操作,具体的硬件功能了解这里不做了解。有更多需求可联系我们具体了解。

说明:这里仅仅对大致ABB机器人硬件组成了解,一些基本操作,具体的硬件功能了解这里不做了解。有更多需求可联系我们具体了解。
工博士是一家智能制造供应链服务商,集科研、产品、营销、服务、互联网于一体的科技型公司。
工博士成立于2013年,总部位于中国上海。公司秉承让智造更简单的使命,以智能化数字化为方向,致力于成为智能制造解决方案的**者,努力推动智能产业升级。
集团业务覆盖智能制造、人工智能、工业自动化供应链三大核心领域。
工博士以“让智造更简单”为企业使命,以“有制造的地方就有工博士”为企业愿景,长期以来致力于工业制造自动化的创新与应用,通过以工业机器人、协作机器人、机器人工作站、自动化集成设备,以及智能装备和机器人周边配套的控制系统、伺服、视觉、触摸屏、PLC、电源、工业导轨、变位机、抓手、吸盘等核心零部件,打造以核心技术驱动的智能硬件服务平台,为制造企业提供智能工厂整体解决方案。
- 下一篇:ABB售后:ABB机器人常规保养
- 上一篇:ABB工业机器人故障及维修方法
